
Step Motorlar 51056
Step Motor Nedir?
Step motorlar bir tam dönüşü belirli sayıda eşit adıma bölen fırçasız DC motorlardır. Motor uygulama için doğru seçildiği sürece pozisyon geri beslemesi veren bir sensöre ihtiyaç duyulmadan motora pozisyon komutu verilip o adımda durması sağlanabilir.
Step motorun her tam dönüşü eşit sayıda adıma bölünmüştür. Bir çok motorda bu sayı 200dür. Motora her adım için ayrıca sinyal göndermek gerekir. Motor her seferinde sadece 1 adım atar ve her adımın boyu birbirine eşittir. Her sinyal motorun kesin olarak tek bir adım atmasını yani kesin bir açıda dönmesini sağladığından (genellikle 1.8 derece), motor pozisyonu geri besleme elemanı olmadan kontrol edilebilir. Dijital darbelerin (sinyaller) frekansı arttıkça adım hareketi sürekli dönüşe döner ve bu dönüşün hızı gönderilen sinyalin frekansıyla doğru orantılıdır. Step motorlar düşük maliyetleri, yüksek güvenilirlikleri, düşük hızlardaki yüksek torkları ve basit korumalı yapılarıyla endüstriyel ve ticari amaçlarla kullanılmaktadır.
Step motorlarının en önemli özellikleri çok doğru pozisyon kontrolüne izin vermeleridir. Step motorlar kusursuz değillerdir, her zaman biraz hata oluşur. Standart step motorlar ± 0.05⁰ doğruluğa sahiptirler. Step motorların bir diğer güzel özelliği de bu hatanın adımdan adıma kümülatif olarak artmamasıdır. Standart bir step motor bir adım atacağında 1.8⁰ ± 0.05⁰ hareket eder. Eğer aynı motor bir milyon adı m atacak olursa yapacağı hareket 1,800,000⁰ ± 0.05⁰ olacaktır.
Step motorların ivmelenmesi ve tepkileri çok hızlıdır. Düşük rotor eylemsizlikleri sayesinde çok çabuk hızlanabilirler. Bu nedenle step motorlar kısa ve hızlı hareketler için çok uygundurlar.
Step Motor Temelleri
Fırçalı DC motorlar terminallerine voltaj uygulandığında dönmeye başlarlar. Step motorlarda ise merkezdeki dişli şeklinde bir demirin etrafında verimli şekilde yerleştirilmiş “dişli” elektromıknatıslar bulunur. Elektromıknatıslar dışarıdan mikrodenetleyici benzeri bir devre ile enerji alırlar.
Motor şaftının dönmesini sağlamak için, önce bir elektromıknatısa güç verilir. Bu sayede elektromıknatıs manyetik olarak dişlinin dişini çeker. Diş elektromıknatıs ile hizaya geldiğinde, diğer dişler, diğer elektromıknatıstan birazcık uzakta durur. Bir sonraki adımda ilk elektromıknatıstaki güç çekilip diğer elektromıknatısa verildiğinde yeni diş ve yeni elektromıknatıs yine hizaya gelir ve diğer dişler ve diğer elektromıknatıs arasında yine küçük bir hiza farkı oluşur. Bu süreç devam ettikçe motor şaftı dönmeye devam eder. Bu küçük dönüşlerin her birine “adım” denir. Bu sayede motor çok kesin bir açıyla dönebilir.
Step Motor Sistemi Elemanları:
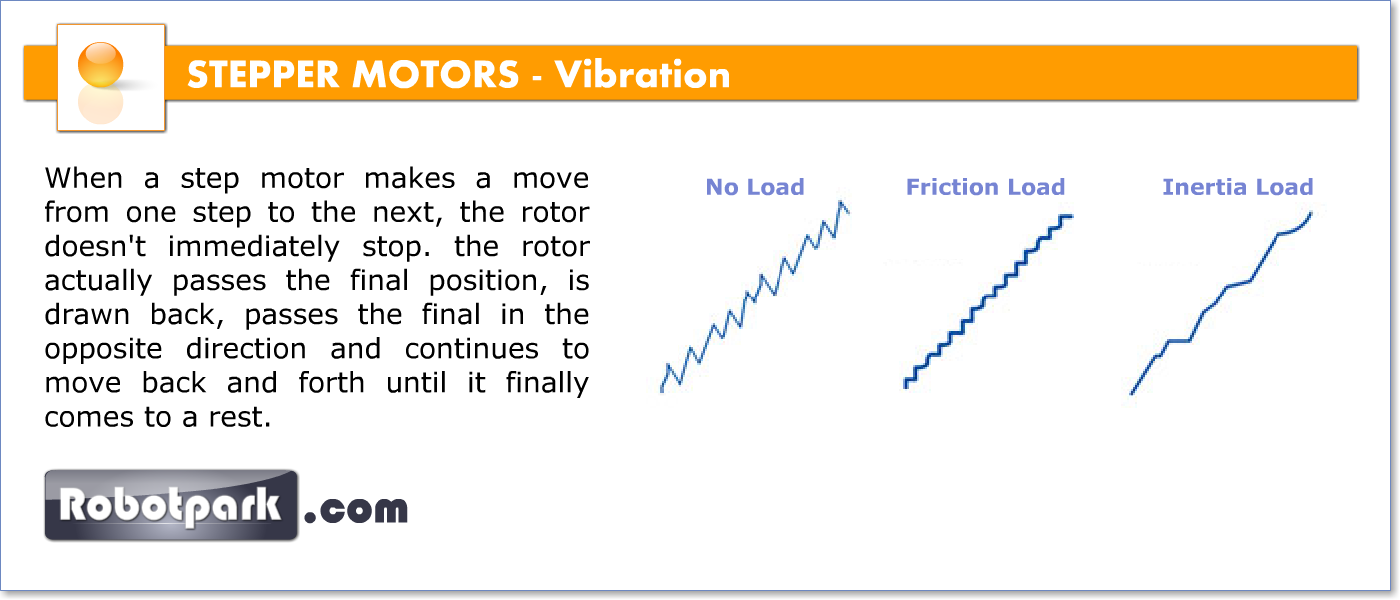
Bir step motor sistemi genellikle bir kullanıcı arayüzü bilgisayar, PLC ya da terminal) ile birleştirilmiş üç temel elemandan oluşur.
- İndeksleyici – İndeksleyici (ya da denetleyici) adım darbeleri ve yön sinyalleri üretebilen bir mikroişlemcidir. Ek olarak indeksleyiciden genel olarak birçok karmaşık komut fonksiyonları sağlaması beklenir.
- Sürücü – Sürücü (ya da yükseltici) indeksleyici sinyallerini motor bobinlerine enerji vermek için gereken güce çeviren elemandır. Değişik voltaj ve akım özelliklerinde ve yapım teknolojileri açısından birçok değişik tipte sürücü bulunmaktadır. Her sürücü her motoru sürmek için uygun değildir. Bu nedenle bir hareket sistemi tasarlarken sürücü seçimi oldukça kritik ve önemlidir.
- Step Motorlar – Step motorlar dijital darbeleri mekanik şaft dönüşüne çeviren elektromanyetik araçlardır. Step motorların avantajları, düşük maliyetleri, yüksek güvenilirlikleri, düşük hızlarda yüksek torkları ve basit ve korumalı yapılarıyla her ortamda çalışabilmeleridir. En büyük dezavantajları ise düşük hızlarda oluşan rezonans efekti ve hız arttıkça torkun düşmesidir.
Step Motor Avantajları
- Motorun dönüş açısı giriş darbesi ile orantılı
- Motor sabit durduğunda ful torka sahip (eğer bobinler enerjiliyse)
- Kesin pozisyonlama ve tekrar edilebilirlik. İyi step motorların doğruluğu %3-%5 adım büyüklüğündedir ve bu hatalar adımlar arası kümülatif değildir.
- Başlama/Durma/Ters hareket arasında muhteşem tepki
- Fırça teması olmadığı için oldukça güvenilir. Bu nedenle step motorun ömrü tamamen yatak ömrüne bağlıdır
- Step motor çalışma şekli nedeniyle açık çevrim sistem olarak kullanılır. Bu sayede daha basit ve ucuz kontrol sistemleri oluşturulabilir
- Şafta direk eşlenmiş bir yükle çok yavaş hızda senkron dönüş yapmak mümkündür
- Hız giriş darbe frekansına bağlı olduğu için geniş dönüş hızı aralığı vardır
Step Motor Dezavantajları
- Düzgün kontrol edilmezse rezonans oluşabilir
- Çok yüksek hızlarda çalışması kolay değil
- Geri besleme sistemi yoktur
Step Modları Nelerdir
Step motorun “step modları”, tam, yarım ve mikro adım olmak üzere üç tanedir. Step modu çıkışının tipi step motor sürücüsünün tasarımına göre değişiklik gösterir. Dördüncü bir mod da bulunsa da pek fazla kullanılmaz.

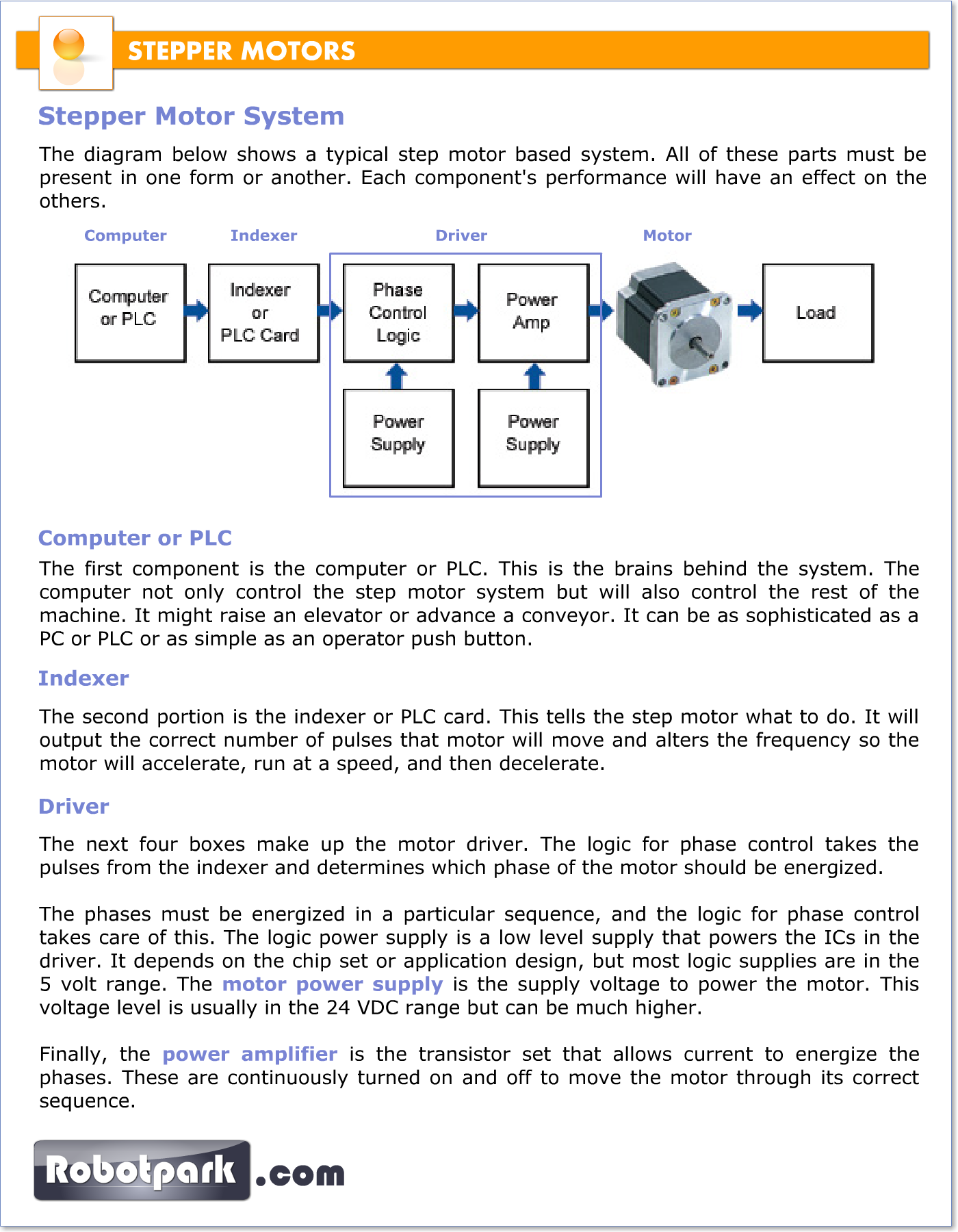
Tam Adım (2 Faz Açık)
Standart hibrit step motorlarda 200 rotor dişi bulunur. Yani motor şaftının her dönüşünde 200 adım vardır. 360 derecelik dönüşü 200 adıma bölersek adım başına 1.8 derece dönüş olduğu görülür. Normalde tam adım modu iki bobine enerji verilirken akım yönü değiştirilerek gerçekleştirilir. Temel olarak sürücüden gelen bir dijital darbe bir adıma eşittir.
Yarım Adım (1-2 Faz Açık)
Yarım adım modunda step motor (normalde 200 adımlı olduğu varsayılırsa) dönüş başına 400 adım atar. Bu modda önce bir bobine enerji verilir, daha sonra 2 bobine enerji verilerek rotorun yarım adım atması sağlanır. Yarım adım da 0.9 dereceye tekabül eder. %30 civarı bir tork kaybı yaşansa da yarım adım modu tam adım moduna göre daha yumuşak bir hareket oluşturur.
Mikro Adım
Mikro adım modu nispeten yeni bir step motor teknolojisidir. Bu modda bobinlere giden akım kontrol edilerek kutuplar arası pozisyonlar ayrıca bölünür. Bazı mikro adım sürücüleri tek bir adımı 256 mikro stepe bölebilirler, böylece toplamda dönüş başına 51200 adım oluşmuş olur (0.007 derece/adım). Mikro adımlama modu genellikle çok doğru pozisyonlama ve yumuşak hareket gerektiren uygulamalarda kullanılır. Yarım adım modu gibi mikro adım modu da tam adım moduna oranla %30 daha az tork sağlar.
Dalga Sürüş Modu
Bu sürüş metodunda belirli bir zamanda sadece bir faz aktif olur. Tam step sürüş modundaki ile aynı adım sayısına sahiptir, ancak motor oldukça düşük tork verir. Nadiren kullanılır.
Step Motor Sürücü Teknolojisine Genel Bakış
Step motor sürücüsü indeksleyiciden adım ve yön bilgisi alıp bunları motoru çalıştıracak elektronik sinyallere çevirir. Motor şaftının her adımı için bir elektronik darbe sinyali gerekmektedir. Tam step modunda 200 adımlık bir motorun tüm turu tamamlaması için 200 adet darbe sinyali gerekmektedir. Hız darbelerin geliş frekansıyla orantılıdır. Bazı sürücüler dahili osilatörleri ile dışarıdan analog sinyal ya da joystickle motor hızının ayarlanmasına izin verirler.
Step motorun hız ve tork performansı sürücüden motor bobinlerine akan akıma bağlıdır. Akışı azaltan ya da akımın bobini enerjiyle doldurma süresini limitleyen faktöre indüktans denir. İndüktans etkisini azaltmak için bir çok sürücü devre motora tavsiye edilen voltajdan daha çok voltaj uygular. Sürücüden çıkan voltaj arttıkça tork ve hız da artar.
Titreşim Problemi
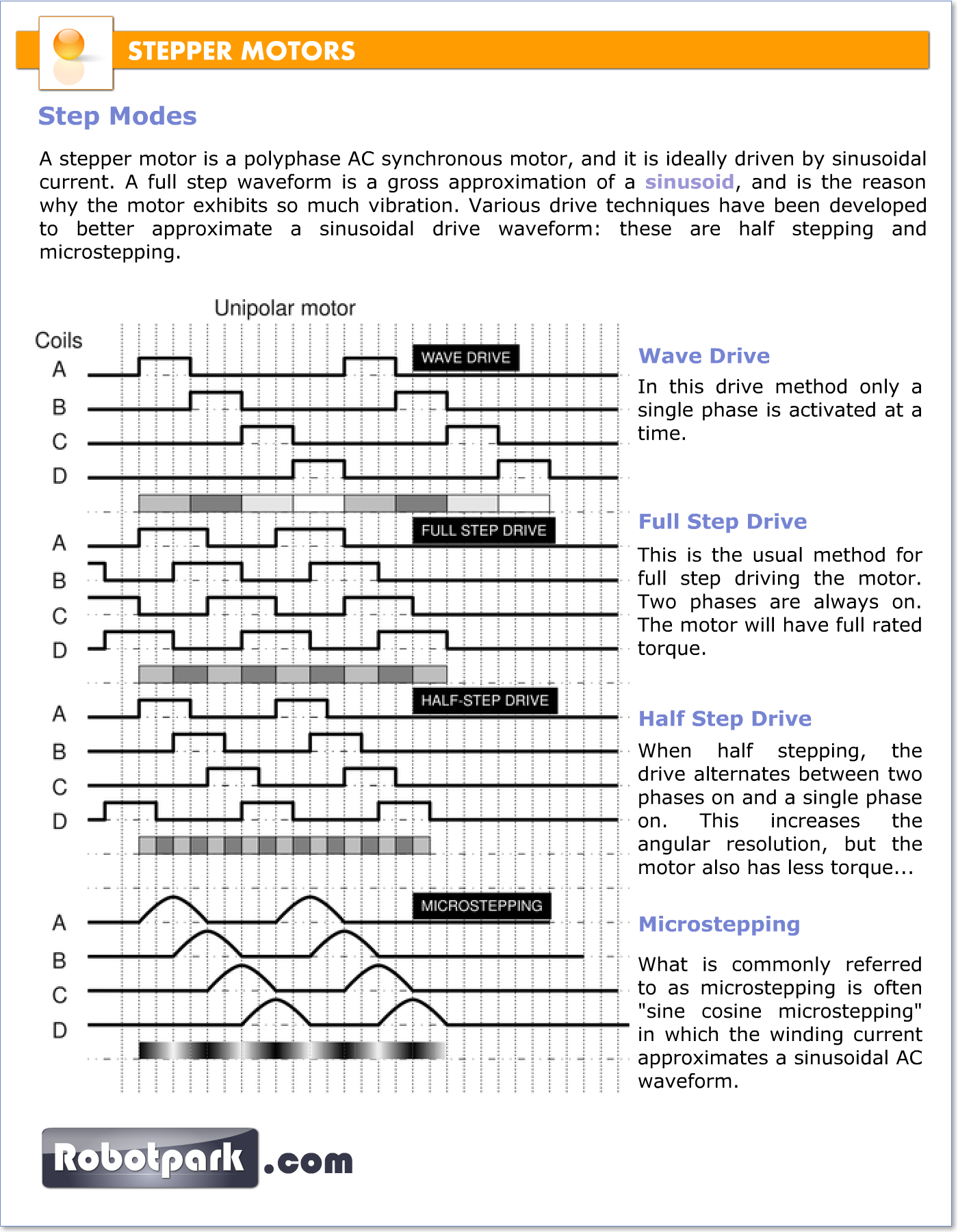
Step motor bir adımdan diğerine geçtiğinde rotor hemen durmaz. Rotor adıma geldikten sonra bir süre salınım yapar. Bu duruma “ringing” denir ve motor her adım attığında meydana gelir. Ancak çoğu durumda motor daha “ringing” bitmeden yeni adım atmaya başlar.
Aşağıdaki grafikler motorun değişik yükler altında ringing değerlerini göstermektedir. Motor yüksüzken çok fazla ringing oluşur. Fazla ringing fazla titreşim anlamına gelmektedir. Motor yüksüzken ya da çok hafif yüklerdeyken titreşim çok fazla olduğu için senkron kaybeder ve genellikle yerinde durur. Bu nedenle bir step motoru test ederken yüklü olmasına dikkat etmek gerekir.
Diğer iki grafikte motorun yüklü olduğu durumlar gösterilmektedir. Motoru düzgün yüklemek performansını akıcı hale getirecektir. Yük motorun sağlayabileceği torkun %30’u ile %70’i arasında olmalıdır ve yük eylemsizliği ile rotor eylemsizliği oranı 1:1 ile 10:1 arasında olmalıdır. Kısa ve hızlı hareketler için oran 1:1 ile 3:1 arasında olmalıdır.
Step Motor Uygulamaları:
Bilgisayar kontrollü step motorlar bir çeşit hareket kontrollü pozisyonlama sistemidir. Tipik olarak tutma ve pozisyonlama uygulamalarında açık çevrim bir sistemin dijital kontrol edilen parçalarıdırlar.
Lazer ve optik alanında genellikle yüksek kesinlikte pozisyonlama uygulamalarında lineer eyleyici, gonyometre ve ayna ayağı olarak kullanılırlar.
Ticari olarak step motorlarfloppy disk sürücülerinde, tarayıcılarda, yazıcılarda, slot makinelerinde, görüntü tarayıcılarda, kompakt disk sürücülerde ve akıllı ışıklandırma sistemlerinde kullanılırlar.
Step Motor Almadan Önce Dikkat Edilmesi Gerekenler
Aşağıdakiler doğru motoru bulmak için uygulanabilecek bilimsel olmayan kurallardır:
- Genel olarak motor gövdesi ne kadar uzunsa sağladığı tork o kadar yüksektir.
- Eğer motor sürücünüz, motorun ihtiyacı olan amper ve voltajı yaratamıyorsa, motor üreticisinin belirttiği torku üretmez.
- Bir motor nominal voltajının üstüne kesici sürücülerle rahatça çıkabilir ancak nominal akımını aşırı ısınma olmadan ve motoru yakmadan aşmak mümkün değildir.
- Step motorların nominal akım/tork durumunda çalışma ısıları 50⁰C’dir
- Güç watt (W) olarak ölçülür ve volt (V) x akım (A) olarak hesaplanır.
- Motora sağlanan güç hareket ve ısıya dönüşür
- Akım ve tork alakalıdır. Akım arttıkça tork artar. Fazla akım aynı zamanda fazla güç ve motorda ve motor sürücüde daha fazla ısınma demektir.
Sonuç
Özet olarak step motorlar pozisyonlama uygulamaları için muhteşemdir. Step motorlar darbe frekansı ayarlanarak uzaklık ve hız olarak yüksek keskinlikte kontrol edilebilirler. Yüksek kutup sayıları sayesinde açık çevrim olarak çalıştıkları halde yüksek doğrulukları vardır. Eğer projeye uygun olarak seçildiyse bir step motor asla adım kaçırmaz. Aynı zamanda pozisyon geri beslemesine ihtiyaç duymadıkları için maliyetleri daha düşüktür.
STEP MOTOR TEMELLERİ- PDF
Kaynaklar
http://reprap.org/wiki/Stepper_motor
http://www.omega.com/prodinfo/stepper_motors.html
http://en.wikipedia.org/wiki/Stepper_motor
http://www.orientalmotor.com/technology/articles/step-motor-basics.html