
Festo ExoHand – Robot Kol – 11042
Festo’nun geliştirdiği ExoHand, hassas parmaklara ve eldiven gibi giyilebilen bir dış iskelete sahip aktif bir manuel ortozisdir. Parmaklar aktif olarak hareket ettirilebilir ve güçleri arttırılabilir. Operatörün el hareketleri gerçek zamanlı olarak robotik kola aktarılır.
İnsan – makine etkileşiminde yeni ufuk
Festo üretimi ExoHand eldiven gibi giyilebilir. Parmaklar aktif şekilde hareket ettirilebilir ve güçleri arttırılabilir. Operatörün el hareketleri gerçek zamanlı olarak kaydedilir ve robot kola gönderilir. Projenin amacı insan elinin gücünü ve dayanıklılığını arttırmak olarak açıklanmaktadır.
Montajdan tıbbi terapiye
ExoHand , endüstriyel montajda monoton ve şiddetli bağlantılarda güç yükseltme amacıyla kullanılabilir. Örneğin tehlikeli ortamlarda güç geri beslemesi ile operatör robot kolun ne tuttuğunu anlayabilir ve tehlikeli ortama girmeden ya da tehlikeli maddeye dokunmadan işini halledebilir.
Pnömatik elemanlarının yüksek güç çıkışı sayesinde ExoHand aynı zamanda servis robotiği için de kullanım alanları bulabilir. Felç hastalarının rehabilitasyonlarında kullanımı mümkün gibi gözükmektedir.
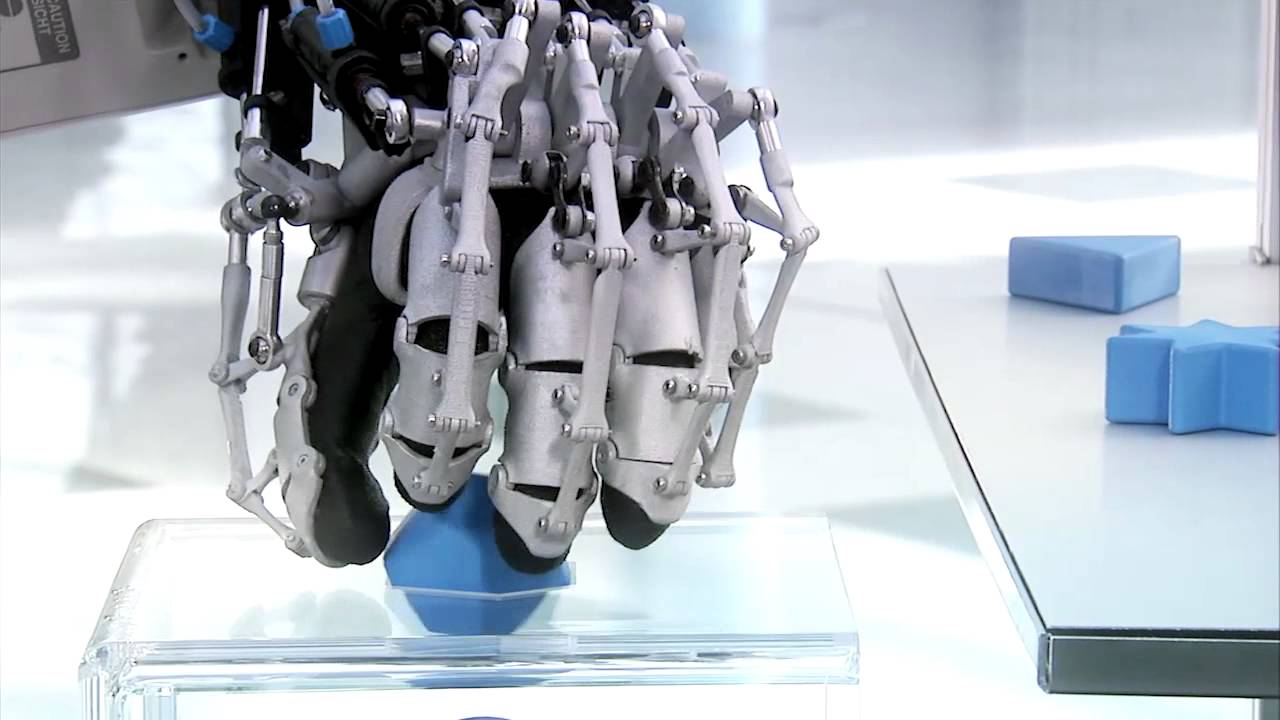
Hassas parmaklarla güçlü bir el
Dış iskelet, insan elini dışarıdan destekler ve fizyolojik serbestlik derecelerini yeninden oluşturur. Parmaklar sekiz çift yönlü pnömatik eyleyici tarafından kontrol edilir ve bu sayede açılıp kapanabilirler. Bu amaçla CodeSys ortamında lineer olmayan kontrol algoritmaları uygulanmıştır ve bu sayede bağımsız parmak eklemlerinin kesin oryantasyon kontrolü sağlanmıştır. ExoHand üzerindeki güç, açı ve pozisyon bilgileri sensörler tarafından ölçülmektedir.
Kaynaklar
Daha fazla bilgi: http://www.festo.com/en/exohand
CPX inside: http://www.10sek.de/festo/index_gb.html
Video:http://youtu.be/EcTL7Hig8h4