

Servo Motorlar 51057
Basit Servo Motor Nedir ?
Servo motorun geniş tanımı performansını düzeltmek için kullandığı bir sensör mekanizması bulunan otomatik araçtır.
Basit servolar pozisyon kontrol uygulamalarında kullanılır. Asıl olarak uçakları uzaktan kumandalı kontrol etmek için tasarlanmışlardır ve düşük maliyetleri ve yüksek torkları onları prototipleme uygulamalarında çok kullanışlı bir eyleyici durumuna getirmiştir. Bir RC Servonun denetleyici tarafından gönderilen komutlarla istenilen pozisyona gelmesi sağlanabilir. Motor kendi içinde o anki pozisyonunu hesaplayıp gitmesi gereken pozisyona hızlıca gitmeye çalışır. Bu bir motoru kontrol etmek için oldukça ucuz ve basit bir yoldur, ancak bazı limitasyonlar vardır. Denetleyicinin motorun o anki pozisyonunu ve hızını bilmesi mümkün değildir. Yumuşak hareketler gereken uygulamalarda agresif ivmelenme yüzünden sorunlar çıkabilir.
Servo motorlar uzun süredir kullanılan ve farklı uygulamalarda faydalanılan motorlardır. Boyutları küçüktür ancak oldukça güçlüdürler ve enerjiyi verimli kullanırlar. Bu özelliklerinden dolayı uzaktan kumandalı uçaklarda, robotlarda ve oyuncak arabalarda kullanılabilirler. Servo motorlar endüstriyel uygulamalarda, robotikte, üretim hatlarında, ilaç sanayinde ve yemek servislerinde de kullanılmaktadır.
Servo motorlar kesin açısal pozisyon, hız ve ivme kontrolleri sağlayabilen döner eyleyicilerdir. İçerisinde pozisyon geri bildirimi için kullanılacak bir sensör ve onla çiftlenmiş uygun bir motor ve nispeten sofistike bir denetleyici gerekmektedir. Denetleyici genellikle servo motor kontrolleri için üretilmiş adanmış bir modüldür.
Servo motorlar değişik bir motor sınıfı değildir, temelde bir motor çalışma prensibidir.Servo mekanizmasıyla açık çevrim bir motoru kontrol ederek kapalı çevrim bir kontrol sistemi oluşur. Servo motorlar robotik, CNC ve otomatik üretim gibi alanlarda kullanılır.
SERVO MEKANIZMASI
İsimden de anlaşılabileceği gibi servo motor aslında servo mekanizmasıdır. Daha çok açmak gerekirse servo motor pozisyon geri beslemesini kullanarak hareketini ve final pozisyonunu kontrol eden kapalı çevrim bir servo mekanizmasıdır. Servo denetleyicisinin girişi şaftın istenen pozisyonunu belirten analog veya dijital bir sinyaldir.
Motor pozisyon ve hız verisini alabilmek için bir sensörle eşleşmiştir. En basit durumda sadece pozisyon ölçülür. Ölçülen pozisyon, istenen pozisyonla karşılaştırılır ve eğer ikisi birbirinden farklıysa bir hata sinyali üretilir. Üretilen hata sinyaline göre motor gerekli yöne doğru döner ve hata sinyali gittikçe düşer. Şaft istenen pozisyona geldiğinde, hata sinyali sıfır olur ve motorun çalışması durur.
En basit servo motorlar bir potansiyometre ile sadece pozisyon ölçümü yapar ve basit açma kapama kontrolü (bang bang kontrol) yapar. Bu metoda motor her zaman en yüksek hızda döner ya da dönmez. Bu tip servo motorlar endüstriyel uygulamalarda kullanılmaz ama radyo kontrollü projelerde kullanılan basit ve ucuz servoların temelini oluştururlar.
SERVO MOTORLAR vs STEP MOTORLAR
Servo motorlar genellikle step motorların yüksek performanslı alternatifi olarak kullanılır. Step motorların belirlenmiş adımları dolayısıyla pozisyon kontrolü için doğal yatkınlıkları bulunur. Bu nedenle step motorlar genellikle encoder bulunmayan açık çevrim pozisyon kontrollerinde kullanılırlar, çünkü sürücü sinyallerinde zaten kaç adım dönmeleri gerektiği bulunmaktadır. Bu geri besleme eksikliği nedeniyle step motorların performansları limitlidir, çünkü step motorlar sadece taşıma kapasitelerinde yükleri sürebilirler, yoksa yüksek yük altında kaçırılan adımlar pozisyon hatalarına sebep olur.
Servo motorun encoder ve denetleyicisi ekstra maliyettir ama bu elemanlar tüm sistemin performansını motorun kapasitesine oranla optimize ederler. Daha büyük motorların sistem içerisinde daha büyük maliyet oranına sahip olduğu sistemlerde, servo motorlar daha avantajlıdır.
SERVO MOTORLAR vs DC MOTORLAR
DC motorların çift telli bağlantıları vardır. Bütün sürücü güç bu iki tel üzerinden gelir. Bir DC motoru çalıştırdığınız zaman hiç durmadan sadece döner. Çoğu DC motor dakikada 5000 devir gibi yüksek hızlarda çalışırlar.
DC motorların hızları (ya da güç seviyeleri) PWM (Pulse Width Modulation – Darbe Genişliği Modülasyonu) denilen bir teknikle kontrol edilir. Tekniğin temelinde motorun hızını sürekli olarak gönderilen gücü açarak ve kapatarak ayarlamak yatar. Bu fikirdeki temel konsept hizmet çevrimidir –açık zamanın kapalı zamana oranı. Eğer bu oran ½ ise motor tam çalışma gücünün yarısı kadar güçle çalışır. Bu da maksimum hızın yarısı anlamına gelir.
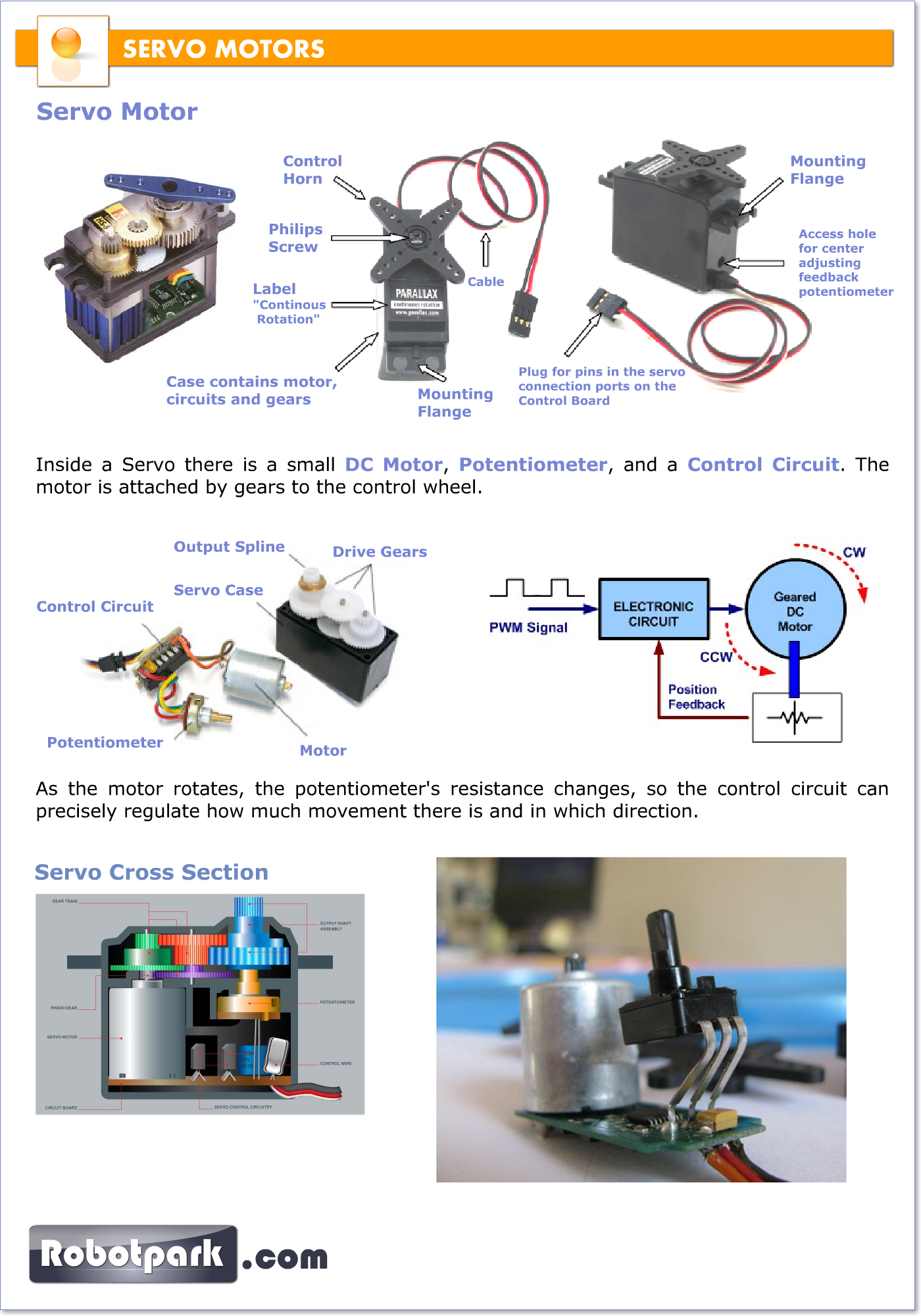
Servo motor ise tamamıyla farklı bir hikayedir. Servo motor aslında dört farklı elemanın beraber çalıştığı bir sistemdir: bir DC motor, bir dişli redüksiyon ünitesi, bir pozisyon ölçme aracı (potansiyometre vs.) ve bir kontrol devresi.
Servonun fonksiyonu şaftın istenilen pozisyonunu belirten bir kontrol sinyalini almak ve DC motoruna şaftı istenilen pozisyona gelene kadar güç vermektir. Pozisyon ölçen aracını şaftın açısal pozisyonunu öğrenmek etmek için kullanır ve bu sayede istenen pozisyona ulaşmak için DC motoru hangi yönde ne hızda döndüreceğine karar verir. Şaft genellikle DC motor gibi özgürce devirlerde dönmez, çoğunlukla ileri geri 200⁰ gibi bir hareket alanı vardır.
Servo motorlarda 3 tel bağlantısı vardır: Güç, toprak ve kontrol. Güç teline sürekli olarak güç kaynağı bağlanmalıdır; servonun güç kaynağından çekilip motora yönlendirilecek gücü ayarlayan kendi sürücü elektronik devreleri vardır.
Kontrol sinyali PWM sinyalidir. Ama burada önemli olan hizmet çevrimindeki açık darbenin süresidir. Örnek olarak 1.520 milisaniyelik bir darbe Futaba S148 servolarda merkez pozisyon anlamına gelir. Bu sinyalden daha uzun bir darbe şaftın saat yönünde merkezden uzaklaşmasına sebep olacakken, daha kısa bir darbe merkezden saat yönünün tersine bir hareket başlatacaktır.
Servo motor kontrol sinyali her 20 milisaniyede bir tekrarlanır. Basitçe her 20 milisaniyede bir servo motora “Şuraya git” komutu verirsiniz.
Özetlemek gerekirse servo motor ve DC motor kontrol sinyalleri arasında iki temel fark vardır. Birincisi servo motorda hizmet çevrimindeki açık zaman kapalı zaman oranının hiçbir önemi yoktur. Önemli olan açık zaman süresinin uzunluğudur ve bu değer motorun şaftının olmasının istendiği pozisyonu belirtir. İkincisi servonun kendi güç elektronik elemanları bulunur, yani kontrol sinyali üzerinden çok az güç akışı olur. Bütün güç motorun ayrıca bağlı olduğu yüksek akım sağlayabilen güç beslemesinden gelir.
SERVO MOTOR TİPLERİ
1- Basit Servo : Ortalama servo, en çok karşılaşılan RC servolardan biridir. Tam beklendiği gibi çalışır ve genellikle 180 derece ile 360 derece arası bir çalışma açıları vardır.
2- Sürekli Dönen Servo: Bunlar pozisyon takip etmeyen servoların bir alt dalıdır. Sürekli bulundukları pozisyonu 0 olarak iletecek şekilde modifiye edilmişlerdir ve istenilen pozisyon sinyali 0 olana kadar dönmeye devam ederler.
3- Lineer Eyleyici Servo: Lineer servolar pistonlar gibi davranırlar. Bu hareket bir vidalı mil kullanılarak gerçekleştirilebilir. Bunun dışında normal servolarla aynı davranışları gösterirler.
4- Dijital Servo: Dijital servolar geleneksel servolarla aynı şekilde çalışırlar. Ancak iç dinamikleri farklıdır. Normalde servolar bir DC motor, bir potansiyometre ve motoru istenen pozisyonda tutmak için denetleyici gibi davranan küçük bir analog devreden oluşurlar. Dijital servolarda ise analog devre yerine aynı işi yapan bir mikrodenetleyici bulunur. Bu sayede dijital servo motorlar daha hızlı tepki sürelerine, daha doğru pozisyon ve hız kontrollerine ve boyutlarına göre daha fazla torka sahip olurlar. Ancak bu servolar diğer servolara oranla daha çok güç tüketirler.
Akım açısından bakıldığında iki tip servo vardır: AC ve DC. AC servolar yüksek akım dalgalanmalarıyla başa çıkabilirler ve genellikle endüstriyel makine uygulamalarında kullanılırlar. DC servolar yüksek akım dalgalanmalarını kaldırabilmeleri için tasarlanmazlar ve bu nedenle küçük uygulamalar için daha uygundurlar. Genel açıdan DC motorlar, AC motorlara oranla daha ucuzdurlar. Bunların dışında sürekli dönüş için özel olarak tasarlanmış servo motorlar da vardır. Bu motorların çıkış şaftlarında düşük sürtünme için iki rulman bulunur.
LINEER SERVO MOTOR VIDEOSU
Bu videoda pozisyon kontrollü lineer servo motor gösterilmektedir. Motor basitçe alüminyum tabanda bir mıknatıs ve araba altında bir bobinden oluşur. Geri besleme ön taraftaki lineer encoder tarafından sağlanır.
SERVO MOTOR NASIL SEÇİLİR
Hangi servoların sizin projenize uygun olduğunu belirlemek için bakılması gereken 3 ana özellik vardır.
- Hareketinizin açısal menzili nedir? Servoların hareket menzilleri programlanarak kolaylıkla azaltılabilir. Ancak daha büyük menzil elde etmek için servonun fiziksel olarak yeterli olduğundan emin olmalısınız. Çoğu servo genellikle 180⁰ menzile sahiptirler
- Pozisyon kontrolünün ne kadar doğru olmasını istiyorsunuz? Servoların hareket menzilleri ne kadar artarsa çözünürlüğü o kadar düşer ve doğruluk azalır.
- Ne kadar torka ihtiyacınız var? Her servonun farklı torku vardır ve uygulamanızdaki ihtiyaçlarınıza göre yüksek ya da düşük torklı servolar ihtiyacınızı karşılayabilir.
Kaynak
http://handyboard.com/hb/faq/hardware-faqs/dc-vs-servo/
http://www.phidgets.com/docs/Servo_Motor_and_Controller_Primer