

SMAVNET Robotları – Uçan Robot Sürüleri 31017
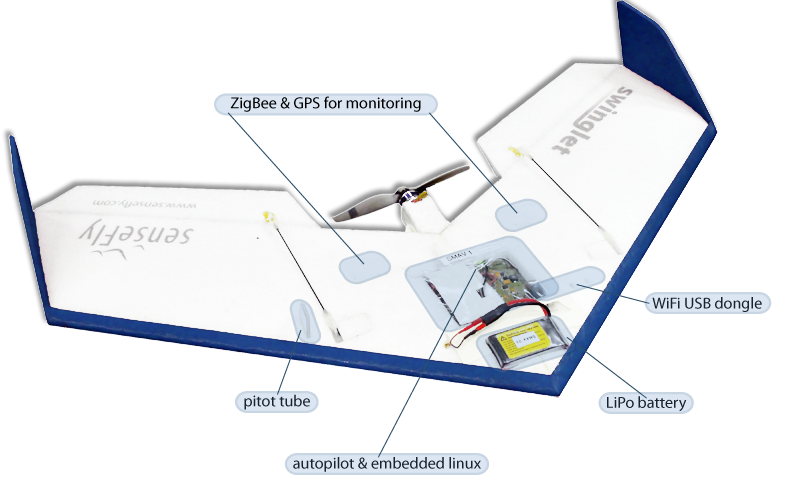
SMAVNET robotları, İsviçre EPFL’de geliştirilen bir bir uçan robot sürüsü projesi. Çalışmayla amaçlanan uçan sürü robotlarını afet alanları üzerinde uçurarak kurtarma ekipleri için iletişim ağları oluşturmak. SMAVNET projesindeki mikro uçan robotlar genişletilmiş polipropilen kullanılarak üretilmiş. Bu sayede ağırlıkları sadece 420g ve kanat genişlikleri 80cm. Uçan robotların arka taraflarında bir elektrik motoru ve elevon olarak görev yapan iki adet yüzeyi bulunmakta. Uçaklar LiPo batarya ile beslenmekte ve 30 dakikalık uçuş zamanlarına sahipler.
Elemanlar
Bir otopilot yükseklik, hız ve dönüş hızını kontrol ederken, otopilot içine gömülü bir mikrodenetleyici jiroskop ve iki basınç sensöründen gelen verilere göre en ekonomik uçuş stratejisini seçiyor. Otopilot Linux ortamında bir Toradex Colibri PXA270 CPU kartı üzerinde çalışıyor. Haberleşme karta bağlı olan bir USB Wi-Fi dongle’ı ile sağlanıyor.
SMAVNET tasarımcıları sürünün davranışlarını belirlerken doğayı kullanmış. Sürünün davranışları karıncalardan esinlenerek oluşturulmuş. Karıncaların yuvaları ile yemek kaynağı arasında bir yol oluşturmak için feromon kullanması gibi bir metod kullanılarak merkez nod ile kurtarma ekibi arasında bir bağlantı oluşturulması mümkün oluyor.
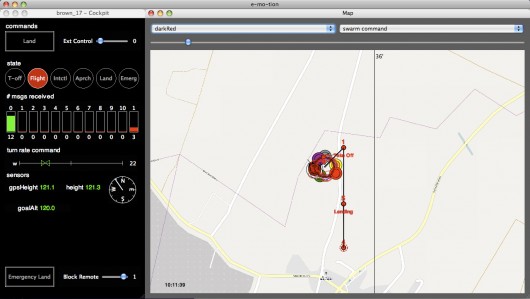
Robotlar kendi aralarında haberleşmeyi sensörler gibi kullanılıyorlar. Doğaya bağımlı GPS ya da kamera gibi yöntemler ya da pahalı veya ağır lazer ve radar gibi yöntemler SMAVNET’te kullanılmıyor. Merkezden ayrıldıktan sonra belirlenmiş bazı robotlar yerlerinde durarak sürü ilerlerken nod olarak işlev görmekteler. Bu görevleri sürü amacına ulaşana ve ağ oluşturulana kadar devam eder. Robotlar otonom olmasına rağmen, PCden bir sürü arayüzü programı ile kontrol edilebilmektedirler.
Her ne kadar 30 dakika kısa bir uçuş süresi ve bir afet anında oldukça limitleyici bir kısıt gibi gözükse de EPFL takımı SMAVNET ile yaptığı birkaç test ile sistemin yine de işe yarar olduğunu göstermiş.
Harici Linkler
http://www.epfl.ch/